In the previous message, you've seen that measured current wasn't so smooth because of the comutation noise in the motor.
There are several ways of filtering the noises from the motors starting from simple to Hi End one:
A single-capacitor filter.
The capacitor is simply soldered across the motor terminals.
The capacitor is simply soldered across the motor terminals.
A two-capacitor filter.
Each capacitor has one lead attached to a motor terminal, and the other lead attached to the case.
Each capacitor has one lead attached to a motor terminal, and the other lead attached to the case.
A three-capacitor filter.
This is basically a combination of the one- and two-capacitor circuits.
These are usually assembled on a separate circuit board which is then soldered to the motor terminals.
A capacitor-choke filter sold by Graupner, designed to be soldered directly to any 05-sized can motor, such as a Graupner Speed 600. Graupner also sells a Speed 400 sized filter.
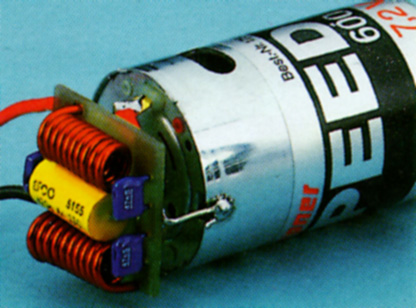
Not much of place soldering that stuff to my robot:

Citation: www.stefanv.com
Motor Isolation.
A simple isolated power supply for robot motors and circuits

A pseudo-isolated power supply for robot motors and circuits

Citation: Beam-Wiki "Reducing Motor Noise"
No comments:
Post a Comment